战略导弹部队装备
导弹
导弹姿态控制系统
请选择
检测质量构成单摆的加速度计。检测质量相当于一个单摆,可绕与输入轴相垂直的另一个轴转动。当检测质量受到加速度的作用而摆动偏离零位时,便由传感器检测输出信号。该信号通过高增益放大器放大并激励力矩器,产生恢复力矩。主要有液浮摆式加速度计、挠性摆式加速度计和宝石支承摆式加速度计等。例如,液浮摆式加速度计...
采用宝石支承检测质量的摆式加速度计。由摆组件、旋转变压器式传感器、永磁式力矩器、宝石轴承和上、下支架组成。检测质量(摆组件)包括摆锤、力矩器动圈、小轴等。表头与模拟放大器一起构成模拟伺服加速度计。当加速度沿输入轴作用于检测质量,在其惯性力矩作用下使检测质量绕输出轴(小轴)转动,旋转变压器式信号传...
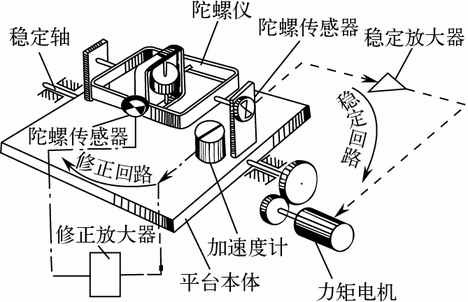
单根轴方向的方位保持不变的陀螺稳定平台。主要由平台本体、稳定回路和修正回路三部分组成。①平台本体。由平台台体、稳定轴和基座组成。平台台体是被稳定的对象,通过稳定轴支承在基座上。②稳定回路。由平台台体上的陀螺仪、伺服放大器和稳定轴上的力矩马达组成。稳定回路的作用是利用陀螺仪特性稳定平台台体。当平台...

利用光导纤维构成光路的激光陀螺仪。分为干涉型和谐振型两类。干涉型光纤陀螺仪的原理是:从光源(激光器)发出的光经分束器分成等强的两相反方向传播的光束,在光纤线圈绕行后,再经分束器而汇合,并在光检测器中产生干涉条纹。当光纤线圈绕其中心轴无旋转角速度ω时,两束光的光程相等,其光程差∆L为零,对应的相位...
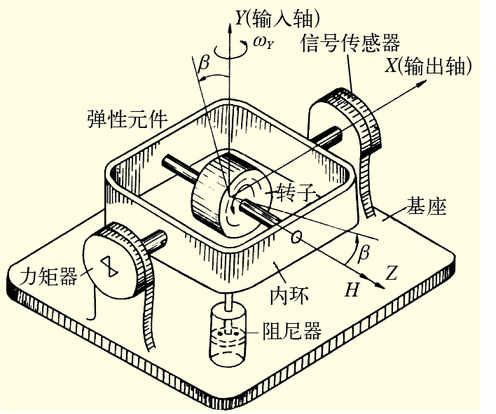
输出转角与输入角速度的积分成比例的单自由度陀螺仪。又称速率积分陀螺仪。从结构原理上看,它是对单自由度陀螺仪施加阻尼而构成的。主要由转子、内框架、阻尼器和信号传感器组成。内框架轴上装有力矩器,用来平衡绕内框架轴的残余不平衡力矩,在组成闭路系统时用以产生作用到陀螺仪上的控制力矩。当基座以角速度ωY绕...
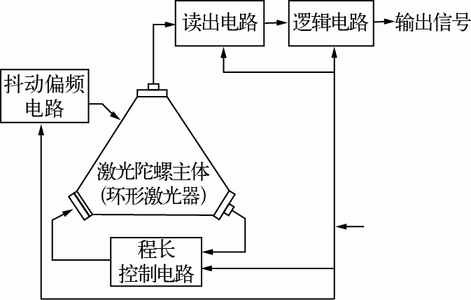
应用激光原理制成的敏感载体空间角速率的陀螺仪。主要由环形激光器、程长控制电路、信号读出电路、逻辑电路、抖动偏频电路等组成。环形激光器是激光陀螺仪的核心,主要由激光器、电源、两个反射镜、一个半透半反镜及合光棱镜等组成。环形激光器的行波谐振腔通常由三面或四面高质量的高反射率反射镜构成。在环形谐振腔内...
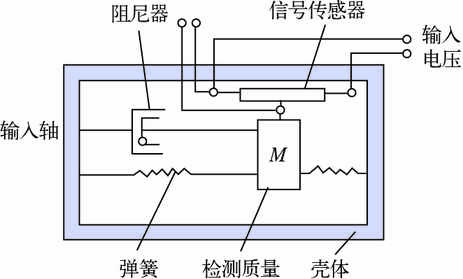
测量绕输入轴的角加速度的装置。输出信号由检测质量的转动惯量对角加速度输入的惯性力矩产生,输出量通常是与输入的角加速度成比例的电信号。角加速度计由扭簧、检测质量、信号传感器、阻尼装置和壳体等组成。当运动物体沿输入轴有角加速度时,在检测质量上作用与角加速度成比例的惯性力矩(比例常数就是检测质量绕输入...
在超高真空内由静电力支承高速旋转的球形转子的陀螺仪。又称静电悬浮陀螺仪、电浮陀螺仪。静电陀螺仪由铅或铍材制成的空心球形或实心球形转子(自由转子)、陶瓷球腔、光电传感器、钛泵、驱动线圈、支承电路系统等组成。球形转子是静电陀螺仪的核心元件,影响整个仪表精度。球形转子依靠静电悬浮支承系统的控制电路对其...

版权所有 © 2020 中国大百科全书出版社 技术支持:稻壳科技
Copyright © 2009 by Encyclopedia of China Publishing House.All Rights Reserved
京ICP备 12000488 号-2 京公网安备 11010202008121 号
(署)网出证(京)字第155号 软著登字第1622908号
 版权声明
版权声明本网站所有内容(包括但不限于文字、图片、图表、音频、视频、页面设计、软件代码、标识、数据资料等)的知识产权和数据权益由中国大百科全书出版社有限公司依法享有或由相关权利人授权中国大百科全书出版社有限公司合法使用。
除法律法规明确规定的法定许可、合理使用情形外,未经中国大百科全书出版社有限公司事先书面许可,任何单位及个人不得以任何方式使用本网站所载内容,包括但不限于复制、修改、改编、翻译、汇编、发布、传播、转载、镜像、抓取、下载、存储,或与其他产品捆绑使用、销售;不得利用数据挖掘、机器人、爬虫或类似的数据采集、提取工具,对本网站内容或服务进行抓取、提取、复制、下载、存储或者镜像(不论一次或多次、全部或部分);不得基于本网站内容创建、发布与本网站实质性相似的数据库或产品;不得对本网站内容进行深度链接、嵌入链接、加框链接或以规避技术措施的方式进行访问和使用;不得将本网站内容用于开发任何软件程序,或用于机器学习、人工智能(AI)系统的数据存储、模型训练、模型优化、内容生成等用途;等等。
任何未经中国大百科全书出版社有限公司书面许可擅自使用本网站内容,或其他侵害中国大百科全书出版社有限公司合法权利、权益的行为,中国大百科全书出版社有限公司将依法保留追究其法律责任的权利。
垂询请致电010-88390786,或请发送电子邮件至support@bkzx.cn。
欢迎社会各界对侵害本网站知识产权的行为进行举报。举报邮箱:dbk_duzhe@ecph.com.cn。